This is part 1 of the assignment for Simulation of Engineering Systems 3
State Space:
(2)Ldtdi+Ri+Keωm=Vin
(Left)dtdi=L1[(VD+ΔV)−Ri−Keωm]
(Right)dtdi=L1[(VD−ΔV)−Ri−Keωm]
For the left hand side: x1=iL, x2=ωmL, x3=ωwL , For the right hand side x4=iR, x5=ωmR, x6=ωwR
x1˙=LVo+ΔV−LRx1−LKex2
x4˙=LVo−ΔV−LRx4−LKex5
(3)Jmdtdωm+Bs(ωm−ωw)=Kti
x2˙=JmKtx1−JmBsx2+JmBsx3
x5˙=JmKtx4−JmBsx5+JmBsx6
(4)JwdtdωW−Bs(ωm−ωw)=0
x3˙=JwBsx2−JwBsx3
x6˙=JwBsx5−JwBsx6
(5)FL=RW2KTiL,(6)FR=RW2KTiR
(7)dtdv+KSv−VTr=KV(FL+FR)VTv
(8)dtdr+VTr−KDv=KY(FL−FR)RM
x7˙=RWVT2KvKTx7x4+RWVT2KvKTx7x1−Ksx7+VTx8
x8˙=RW2KyKTRmx1−RW2KyKTRmx4+KDx7−VTx8
(1)ΔV=GcΔψ
ΔV=Gc(ψref−ψ)
let ψ=x9
ΔV=Gc(ψref−x9)
∴x1˙=LVo+LGCψref−LGCx9−LRx1−LKex2
x4˙=LVo−LGcψref+LGcx9−LRx4−LKex5
x4˙=LVo−LGcψref+LGcx9
x9˙=x8
x1˙x2˙x3˙x4˙x5˙x6˙x7˙x8˙x9˙=−LRJmKt0000RWVT2KvKTRW2KyKTRm0−LKe−JmBsJwBs0000000JmBs−JwBs000000000−LRJmKt0RWVT2KvKT−RW2KyKTRm0000−LKe−JmBsJwBs0000000JmBs−JwBs000000RWVT2KvKT00−KsKD0000000VT−VT1L−GC00LGC00000x1x2x3x4x5x6x7x8x9+L100L100000LGC00−LGC00000[Voψref]
State Space:
- x1˙=LVo+LGCψref−LGCx9−LRx1−LKex2
- x2˙=JmKtx1−JmBsx2+JmBsx3
- x3˙=JwBsx2−JwBsx3
- x4˙=LVo−LGcψref+LGcx9−LRx4−LKex5
- x5˙=JmKtx4−JmBsx5+JmBsx6
- x6˙=JwBsx5−JwBsx6
- x7˙=RWVT2KvKTx7x4+RWVT2KvKTx7x1−Ksx7+VTx8
- x8˙=RW2KyKTRmx1−RW2KyKTRmx4+KDx7−VTx8
- x9˙=x8
function xdot = rover(x,u);
global Vo;
global Gc;
global Bs;
global Kt;
global Ke;
global Ky;
global Jw;
global Jm;
global Rm;
global L;
global Pr;
xdot(1,1) = (Vo+Gc*Pr-Gc*x(9)-R*x(1)-Ke*x(2) ) /L;
xdot(2,1) = (Kt*x(1)-Bs*x(2)+Bs*x(3))/Jm;
xdot(3,1) = (Bs*x(2)-Bs*x(3))/Jw;
xdot(4,1) = (Vo - Gc*Pr + Gc*x(9)-R*x(4)-Ke*x(5))/L;
xdot(5,1) = (Kt*x(4) - Bs*x(5) + Bs*x(6))/Jm;
xdot(6,1) = (Bs*x(5)-Bs*x(6))/Jw;
xdot(7,1) = (2*Kt*Kv*x(7)*x(4))/(Rw*Vt) + (2*Kt*Kv*x(7)*x(1))/(Rw*Vt) - Ks*x(7) + Vt*x(8);
xdot(8,1) = (2*Ky*Kt*Rm*x(1))/Rw - (2*Ky*Kt*Rm*x(4))/Rw + Kd*x(7) - Vt*x(8);
xdot(9,1) = x(8);
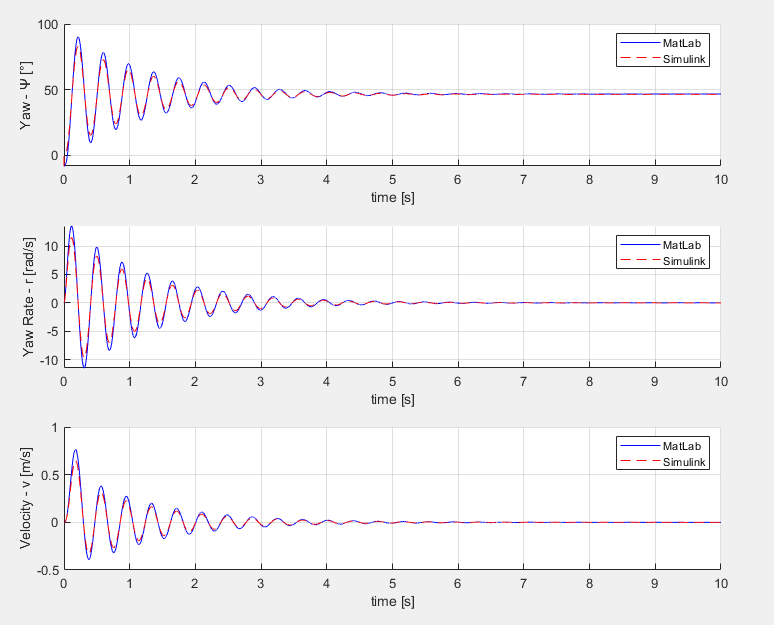
legend('MatLab', 'Simulink')