Abstract:
Block 3, based on the materials of Tutorial 3 (2023), typically is the content used for questions 3 and 4 of Simulation of Engineering Systems, so given that the exam is a choose 2 of 4 style exam, you should hopefully be able to pass with 100% from this material alone
That being said, please don’t rely only on this resource, I’m not liable for them putting only one question on this block in the exam.
If this document kicks about long enough it also may be out of date.
Numerical/Graphical Integration:
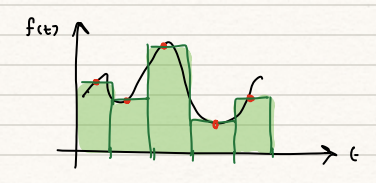
Midpoint Rule:
Abstract
The response shown in Figure 2 is obtained from the following state equation By using a partition size of 0.5, calculate the values for state x by integrating the curve shown in Figure 2 at each time interval using the Midpoint Rule (from 0-2.5s)
Example
| $ | |||||||||||
| \begin{align} | |||||||||||
| I_0 &= \int^{0.5}_0 f(t)dt \approx (t_1-t_0)(f(\frac{t_1+t_0}{2})) = (0.5-0)(4.10) = 2.05\ | |||||||||||
| I_1 &= \int^{1.0}_{0.5} f(t)dt \approx (t_2-t_1)(f(\frac{t_2+t_1}{2})) = (1.0-0.5)(-1.04) = -0.52 \ | |||||||||||
| I_2 &= \int^{1.5}_{1.0} f(t)dt \approx (t_3-t_2)(f(\frac{t_3+t_2}{2})) = (1.5-1.0)(-4.04)=-2.02\ | |||||||||||
| I_3 &= \int^{2.0}_{1.5} f(t)dt \approx (t_4-t_3)(f(\frac{t_4+t_3}{2})) = (2.0-1.5)(-1.79) = -0.90 \ | |||||||||||
| I_4 &= \int^{2.5}_{2.0} f(t)dt \approx (t_5-t_4)(f(\frac{t_5+t_4}{2})) = (2.5-2.0)(1.15) = 0.58\ | |||||||||||
| \end{align} | |||||||||||
| $ | |||||||||||
| Therefore: | |||||||||||
| $ | |||||||||||
| \begin{align} | |||||||||||
| t_1&=0.5s, x_1 = x_0+I_0 = 0 + 2.05 = 2.05\ | |||||||||||
| t_2&=1.0s, x_2 = x_1+I_1 = 2.05 + (-0.52) = 1.53\ | |||||||||||
| t_3&=1.5s, x_3 = x_2+I_2 = 1.53 + (-2.02) = -0.49\ | |||||||||||
| t_4&=2.0s, x_4 = x_3+I_3 = -0.49 + (-0.90) = -1.39\ | |||||||||||
| t_5&=2.5s, x_5 = x_4+I_4 = -1.39+0.58 = -0.81\ | |||||||||||
| \end{align} | |||||||||||
| $ | |||||||||||
| So we deduce that | |||||||||||
| $ | |||||||||||
| \int^{2.5}_0 2\cos3t + 3\cos2t \approx -0.81 | |||||||||||
| $ |
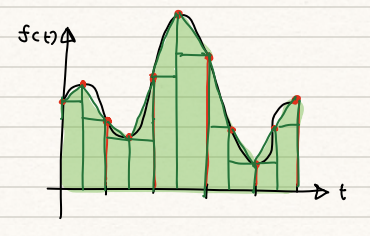
Simpson’s Rule:
Abstract
The response shown in Figure 2 is obtained from the following state equation By using a partition size of 0.5, calculate the values for state x by integrating the curve shown in Figure 2 at each time interval using Simpson’s Rule (from 0-2.5s)
Example
| $ | |||||||||||
| \begin{align} | |||||||||||
| I_0 &= \int^{0.5}_0 f(t)dt \approx \frac{1}{6}(t_1-t_0)(f(t_0)+4f(\frac{t_1+t_0}{2})+f(t_1)) = \frac{1}{6}(0.5-0)(23.16) = 1.93\ | |||||||||||
| I_1 &= \int^{1.0}_{0.5} f(t)dt \approx \frac{1}{6}(t_2-t_1)(f(t_1)+4f(\frac{t_2+t_1}{2})+f(t_2)) = \frac{1}{6}(1.0-0.5)(-5.63) = -0.47 \ | |||||||||||
| I_2 &= \int^{1.5}_{1.0} f(t)dt \approx \frac{1}{6}(t_3-t_2)(f(t_2)+4f(\frac{t_3+t_2}{2})+f(t_3)) = \frac{1}{6}(1.5-1.0)(-22.78)=-1.90\ | |||||||||||
| I_3 &= \int^{2.0}_{1.5} f(t)dt \approx \frac{1}{6}(t_4-t_3)(f(t_3)+4f(\frac{t_4+t_3}{2})+f(t_4)) =\frac{1}{6} (2.0-1.5)(-10.59) = -0.88 \ | |||||||||||
| I_4 &= \int^{2.5}_{2.0} f(t)dt \approx \frac{1}{6}(t_5-t_4)(f(t_4)+4f(\frac{t_5+t_4}{2})+f(t_5)) = \frac{1}{6}(2.5-2.0)(6.1) = 0.51\ | |||||||||||
| \end{align} | |||||||||||
| $ | |||||||||||
| Therefore: | |||||||||||
| $ | |||||||||||
| \begin{align} | |||||||||||
| t_1&=0.5s, x_1 = x_0+I_0 = 0 + 1.93 = 2.05\ | |||||||||||
| t_2&=1.0s, x_2 = x_1+I_1 = 1.93 + (-0.47) = 1.46\ | |||||||||||
| t_3&=1.5s, x_3 = x_2+I_2 = 1.46 + (-1.90) = -0.44\ | |||||||||||
| t_4&=2.0s, x_4 = x_3+I_3 = -0.44 + (-0.88) = -1.32\ | |||||||||||
| t_5&=2.5s, x_5 = x_4+I_4 = -1.32 + 0.51 = -0.81\ | |||||||||||
| \end{align} | |||||||||||
| $ | |||||||||||
| So we deduce that | |||||||||||
| $ | |||||||||||
| \int^{2.5}_0 2\cos3t + 3\cos2t \approx -0.81 | |||||||||||
| $ |
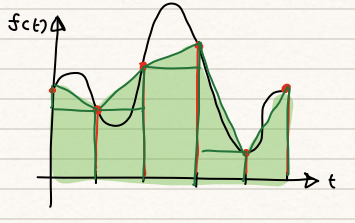
Trapezoid Rule:
Abstract
The response shown in Figure 2 is obtained from the following state equation By using a partition size of 0.5, calculate the values for state x by integrating the curve shown in Figure 2 at each time interval using the Trapezoid Rule (from 0-2.5s)
Example
| $ | |||||||||||
| \begin{align} | |||||||||||
| I_0 &= \int^{0.5}_0 f(t)dt \approx \frac{1}{2}(t_1-t_0)(f(t_1)+f(t_0)) = \frac{1}{2}(0.5-0)(6.76) = 1.69\ | |||||||||||
| I_1 &= \int^{1.0}_{0.5} f(t)dt \approx \frac{1}{2}(t_2-t_1)(f(t_2)+f(t_1)) = \frac{1}{2}(1.0-0.5)(-1.47) = -0.37 \ | |||||||||||
| I_2 &= \int^{1.5}_{1.0} f(t)dt \approx \frac{1}{2}(t_3-t_2)(f(t_3)+f(t_2)) = \frac{1}{2}(1.5-1.0)(-6.62)=-1.66\ | |||||||||||
| I_3 &= \int^{2.0}_{1.5} f(t)dt \approx \frac{1}{2}(t_4-t_3)(f(t_4)+f(t_3)) = \frac{1}{2}(2.0-1.5)(-3.43) = -0.86 \ | |||||||||||
| I_4 &= \int^{2.5}_{2.0} f(t)dt \approx \frac{1}{2}(t_5-t_4)(f(t_5)+f(t_4)) = \frac{1}{2}(2.5-2.0)(1.50) = 0.38\ | |||||||||||
| \end{align} | |||||||||||
| $ | |||||||||||
| Therefore: | |||||||||||
| $ | |||||||||||
| \begin{align} | |||||||||||
| t_1&=0.5s, x_1 = x_0+I_0 = 0 + 1.69 = 1.69\ | |||||||||||
| t_2&=1.0s, x_2 = x_1+I_1 = 1.69 + (-0.37) = 1.32\ | |||||||||||
| t_3&=1.5s, x_3 = x_2+I_2 = 1.32 + (-1.66) = -0.34\ | |||||||||||
| t_4&=2.0s, x_4 = x_3+I_3 = -0.34 + (-0.86) = -1.2\ | |||||||||||
| t_5&=2.5s, x_5 = x_4+I_4 = -1.2 + 0.38 = -0.82\ | |||||||||||
| \end{align} | |||||||||||
| $ | |||||||||||
| So we deduce that: | |||||||||||
| $ | |||||||||||
| \int^{2.5}_0 2\cos3t + 3\cos2t \approx -0.82 | |||||||||||
| $ |
Errors:
Absolute Error:
Abstract
Find the absolute error of the value of the integral of: From 0 to 2 seconds Comparing the value estimated by the Trapezoid Rule and Simpson’s Rule, against a calculated value for the integral
Example
\begin{align} x &= \int^{2.0}_0 \dot{x}dx = [\frac{2}{3}\sin3t + \frac{3}{2}\sin2t]^{2.0}_0 \\ x &= \frac{2}{3}\sin(6.0)+\frac{3}{2}\sin(4.0) = -1.32 \end{align} \begin{align} \textbf{Simpson : } e_A &= |-1.32 -(-1.32)| = 0.0 \\ \textbf{Trapezoid : } e_A &= |-1.32 - (-1.2)| = 0.12 \end{align}
Relative Error:
Abstract
From the previous question calculate the relative error for both the Trapezoid and Simpson’s Rule
Example
\begin{align} \textbf{Simpson : }e_R &= \frac{0.0}{|-1.32|} = 0 \\ \textbf{Trapezoid : }e_R &= \frac{0.12}{|-1.32|} = 0.091 \end{align}
Newton’s Interpolation
Abstract
From the following set of data calculate the interpolated
Example
\begin{align} •& \textbf{ Constant} \\ &P_0(x) = 3 \\ & \\ •& \textbf{ Linear} \\ &P_1(x) = P_0(x) + c_1(x-x_1) \\ & = 3 + c_1(x-1)\\ &\frac{13}{4} = 3 +c_1(\frac{3}{2}-1) \\ &\therefore c_1 = \frac{1}{2} \\ &\therefore P_1(x) = 3 + \frac{1}{2}(x-1) = \frac{5}{2} + \frac{1}{2}x \\ & \\ \end{align} \begin{align} •& \textbf{ Quadratic} \\ &P_2(x) = P_1(x) + c_2(x-x_1)(x-x_2) \\ & = \frac{5}{2} + \frac{1}{2}x + c_2(x-1)(x-\frac{3}{2})\\ & 3 =\frac{5}{2} + c_2(0-1)(0-\frac{3}{2}) \\ &\therefore c_2 = \frac{1}{3} \\ &\therefore P_2(x) = \frac{5}{2} + \frac{1}{2}x + \frac{1}{3}(x-1)(x-\frac{3}{2}) \\ & \\ \end{align} \begin{align} •& \textbf{ Cubic} \\ &P_3(x) = P_2(x) + c_3(x-x_1)(x-x_2)(x-x_3) \\ & = \frac{5}{2} + \frac{1}{2}x + \frac{1}{3}(x-1)(x-\frac{3}{2}) +c_3(x-1)(x-\frac{3}{2})x\\ & \frac{5}{3} = \frac{5}{2} + \frac{1}{2}*2 + \frac{1}{3}(2-1)(2-\frac{3}{2}) + c_3(2-1)(2-\frac{3}{2})2 \\ &\therefore c_3 = -2 \\ &\therefore P_3(x) = \frac{5}{2} + \frac{1}{2}x + \frac{1}{3}(x-1)(x-\frac{3}{2}) -2 (x-1)(x-\frac{3}{2})x \\ & \\ \end{align} So our final answer is
Newton Divided Difference:
| = | ||||
| = | = | |||
| = | = | = |
Which we can then convert to:
Standard Form:
Nested Form:
Abstract
For the following table derive the Newton’s Divided Difference
Example
| f[] | f[,] | f[,,] | f[,,,] | |
|---|---|---|---|---|
| 1 | 3 | |||
| = | ||||
| 0 | 3 | = | = | |
| 2 | = | = | = | |
| $ | ||||
| \begin{align} | ||||
| a_0 = 3, a_1 = \frac{1}{2}, a_2 = \frac{1}{3}, a_3=-2 | ||||
| \end{align} | ||||
| $ | ||||
| $ | ||||
| P_3(x) = 3 + \frac{1}{2}(x-1) + \frac{1}{3}(x-1)(x-\frac{3}{2}) -2(x-1)(x-\frac{3}{2})(x) | ||||
| $ | ||||
| $ | ||||
| P_3(x) = 3 + (x-1)(\frac{1}{2} + (x-\frac{3}{2})(\frac{1}{3}-2x) ) | ||||
| $ |
Splines:
Linear Splines:
To note: is derived from the fact should equal at
Abstract
Interpolate these data points using Linear Splines:
Example
\begin{align} \textbf{Spline 1}&: S_1(t) = a_1t + b_1 \\ \textbf{Slope } a_1 &= \frac{0.087 - (-0.866)}{-85-(-150)} = \frac{0.953}{65} = 0.0147 \\ \text{at } t=-85& \text{ , } S_1(-85)=0.087 \\ \therefore \text{ }& 0.0147*-85+b_1 = 0.087 \\ & b_1 = 1.3365 \\ \therefore \text{ }&S_1(t) = 0.0147t + 1.3365 \\ &\\ &\\ \end{align} \begin{align} \textbf{Spline 2}&: S_2(t) = a_2t + b_2 \\ \textbf{Slope } a_2 &= \frac{0.545 - 0.087}{57-(-85)} = \frac{0.458}{142} = 0.0032 \\ \text{at } t=57& \text{ , } S_2(57)=0.545 \\ \therefore \text{ }& 0.0032*57+b_2 = 0.545 \\ & b_2 = 0.3626 \\ \therefore \text{ }&S_2(t) = 0.0032t + 0.3626 \\ &\\ &\\ \end{align} \begin{align} \textbf{Spline 3}&: S_3(t) = a_3t+ b_3 \\ \textbf{Slope } a_3 &= \frac{-0.391 - 0.545}{113-57} = \frac{-0.936}{56} = -0.0167 \\ \text{at } t=113& \text{ , } S_3(113)=-0.391 \\ \therefore \text{ }& -0.0167*113+b_3 = -0.391 \\ & b_3 = 1.4961 \\ \therefore \text{ }&S_3(t) = -0.0167t + 1.4961 \\ &\\ &\\ \end{align} \begin{align} \textbf{Spline 4}&: S_4(t) = a_4t+ b_4 \\ \textbf{Slope } a_4 &= \frac{-0.974 - (-0.391)}{167-113} = \frac{-0.583}{54} = -0.0108 \\ \text{at } t=167& \text{ , } S_4(167)=-0.974 \\ \therefore \text{ }& -0.0108*167+b_4 = -0.974 \\ & b_4 = 0.8296 \\ \therefore \text{ }&S_4(t) = -0.0108t + 0.8296 \\ &\\ &\\ \end{align}
Quadratic Splines:
Where:
Abstract
Interpolate these data points using Quadratic Splines:
Example
\begin{align} \textbf{Slope}&\textbf{ Values at Knots:} \\ z_1 &= 0 \text{ (Assumed)} \\ z_2 &= -z_1 + 2(\frac{g_2-g_1}{t_2-t_1}) = -0 + 2(\frac{0.087 - (-0.866)}{-85-(-150)}) = 0.0293 \\ z_3 &= -z_2 + 2(\frac{g_3-g_2}{t_3-t_2}) = -0.0293 + 2(\frac{0.545 - 0.087}{57-(-85)}) = -0.0228 \\ z_4 &= -z_3 + 2(\frac{g_4-g_3}{t_4-t_3}) = 0.0228 + 2(\frac{-0.391 - 0.545}{113-57}) = -0.0106 \\ z_5 &= -z_4 + 2(\frac{g_5-g_4}{t_5-t_4}) = 0.0106 + 2(\frac{-0.974 - (-0.391)}{167-113}) = -0.0110 \\ &\\ &\\ \end{align} \begin{align} S_1(t) &= \frac{z_2-z_1}{2(t_2-t_1)}(t-t_1)^2 + z_1(t-t_1) +g_1 \\ S_1(t) &= \frac{0.0293 - 0}{2(-85-(-150))}(t+150)^2 + 0(t+150) - 0.866 \\ S_1(t) &= 2.254*10^{-4}(t+150)^2-0.866 \\ &\\ &\\ \end{align} \begin{align} S_2(t) &= \frac{z_3-z_2}{2(t_3-t_2)}(t-t_2)^2 + z_2(t-t_2) +g_2 \\ S_2(t) &= \frac{-0.0228-0.0293}{2(57-(-85))}(t+85)^2 + 0.0293(t+85) + 0.087 \\ S_2(t) &= -1.838*10^{-4}(t+85)^2+0.0293(t+85)+0.087 \\ &\\ &\\ \end{align} \begin{align} S_3(t) &= \frac{z_4-z_3}{2(t_4-t_3)}(t-t_3)^2 + z_3(t-t_3) +g_3 \\ S_3(t) &= \frac{-0.0106-(-0.0228)}{2(113-57)}(t-57)^2 - 0.0228(t-57) + 0.545 \\ S_3(t) &= 1.089*10^{-4}(t-57)^2-0.0228(t-57)+0.545 \\ &\\ &\\ \end{align} \begin{align} S_4(t) &= \frac{z_5-z_4}{2(t_5-t_4)}(t-t_4)^2 + z_4(t-t_4) +g_4 \\ S_4(t) &= \frac{-0.0110-(-0.0106)}{2(167-113)}(t-113)^2 - 0.0106(t-113) - 0.391 \\ S_4(t) &= -0.037*10^{-4}(t-113)^2-0.0106(t-113)-0.391 \\ &\\ &\\ \end{align}
Extra Note:
If something on this document is wrong, or you want to add something, or want the original markdown I made this in contact me via:
- Discord : @arsenxc
- Github : StefVuck
Gist: https://gist.github.com/StefVuck/1006355703e01c008aa0e7d4a386f424