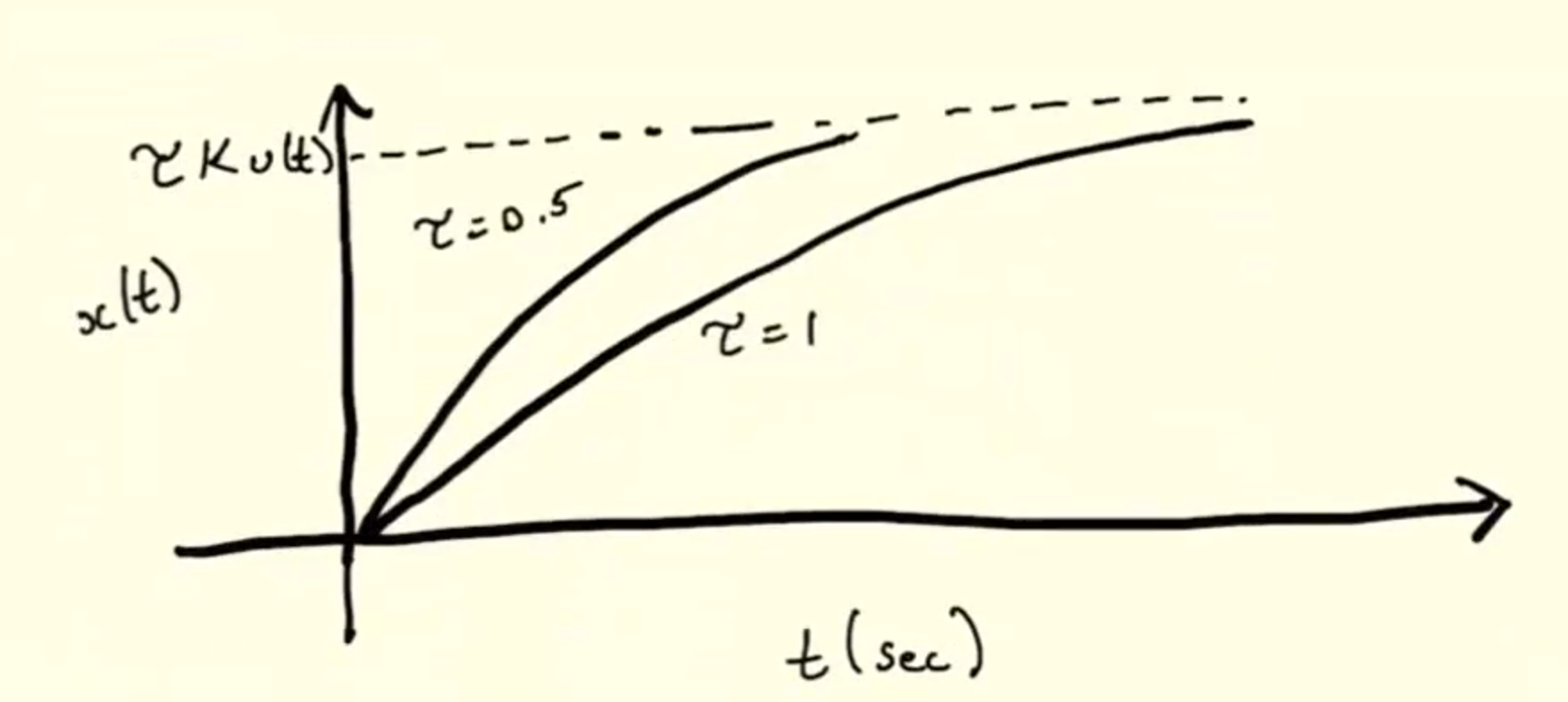
x(t)→ state || output, u(t)→ input
K→ gain, τ→time constant
Varying of τ changes the speed of the system, and varying the gain of the system changes the magnitude of the output with respect to the input
Laplace:
τs+11
Proportional Control:
We have here our controller (G1(s)=Kp), and our plant (G2(s)=τs+11)
This means that:
Our Steady State Response
R(s)C(s)Given: R(s)C(s)csscss=1+τs+1Kpτs+1Kp=1+τs+KpKp=s1 for step input=s(1+τs+Kp)Kp=s→0lim{sC(s)}=s→0lim{τs+1+KpKp}=1+KpKp=1+KpKp
Our Steady State Error
R(s)E(s)Given: R(s)E(s)essess=1+τs+1Kp1=1+τs+Kpτs+1=s1 for step input=s(1+τs+Kp)τs+1=s→0lim{sE(s)}=s→0lim{τs+1+Kpτs+1}=1+Kp1=1+Kp1
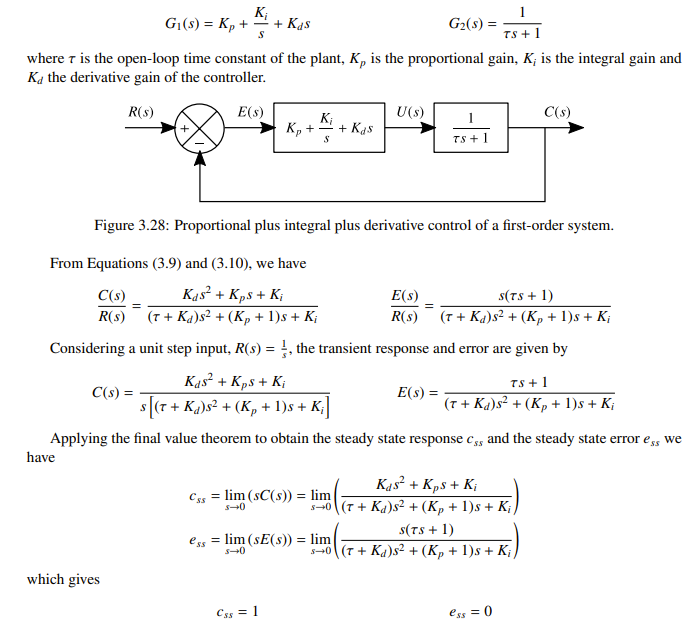
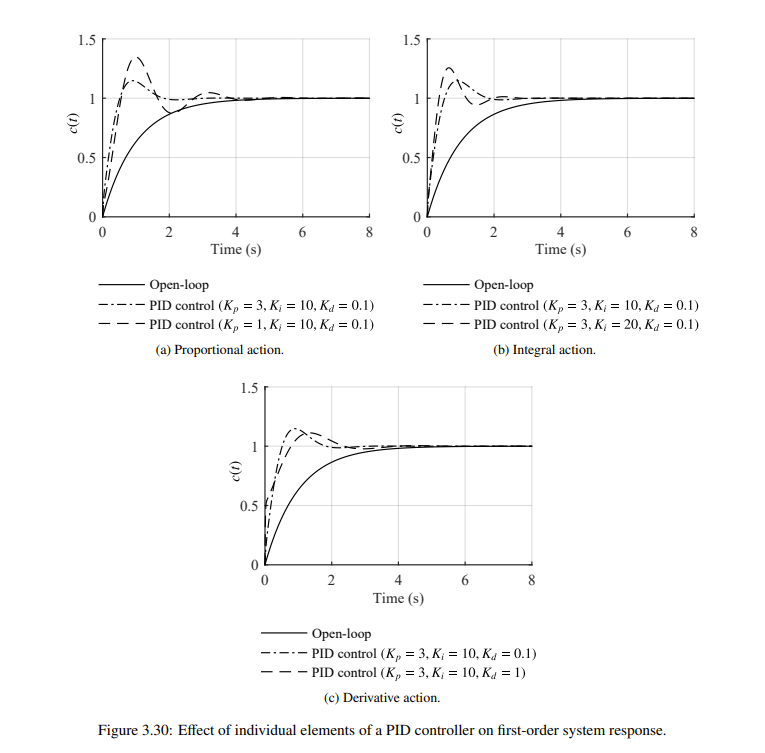
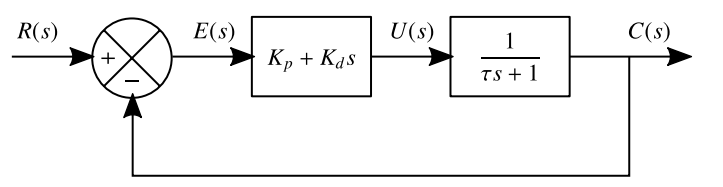
PD Control:
We have here our controller (G1(s)=Kp+Kds), and our plant (G2(s)=τs+11)
Once again, if we assume a unity step input, or R(s)=s1:
Our Steady State Response
R(s)C(s)Given: R(s)C(s)csscss=1+τs+1Kp+Kdsτs+1Kp+Kds=1+(τ+Kd)s+KpKp+Kds=s1 for step input=s(1+(τ+Kd)s+Kp)Kp+Kds=s→0lim{sC(s)}=s→0lim{1+(τ+Kd)s+KpKp+Kds}=1+KpKp=1+KpKp
Our Steady State Error
R(s)E(s)Given: R(s)E(s)essess=1+τs+1Kp+Kds1=1+(τ+Kd)s+Kpτs+1=s1 for step input=s(1+(τ+Kd)s+Kp)τs+1=s→0lim{sE(s)}=s→0lim{1+(τ+Kd)s+Kpτs+1}=1+Kp1=1+Kp1
Closed Loop Time Constant
τcl=Kp+1τ+Kd
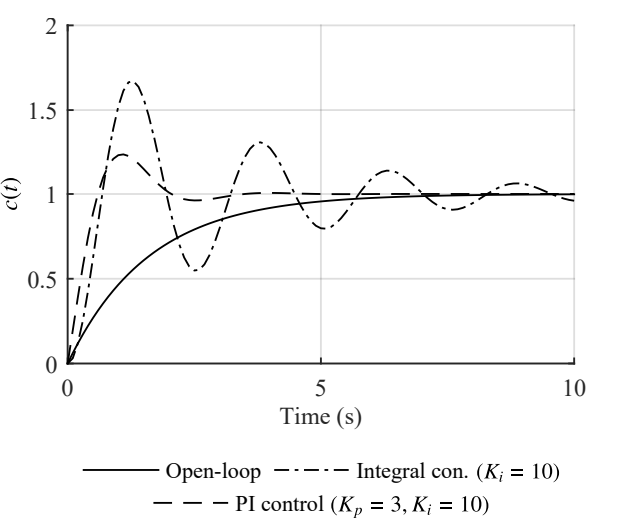
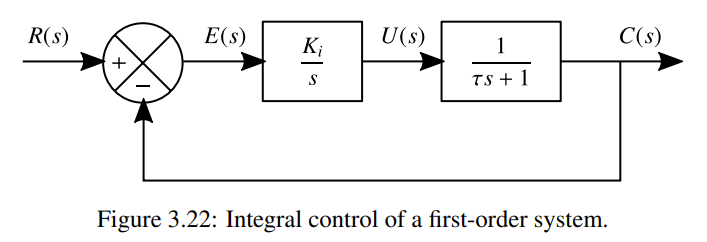
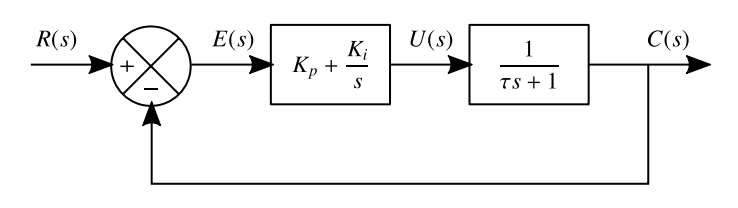
Integral Control
We have here our controller (G1(s)=sKi), and our plant (G2(s)=τs+11)
So it follows:
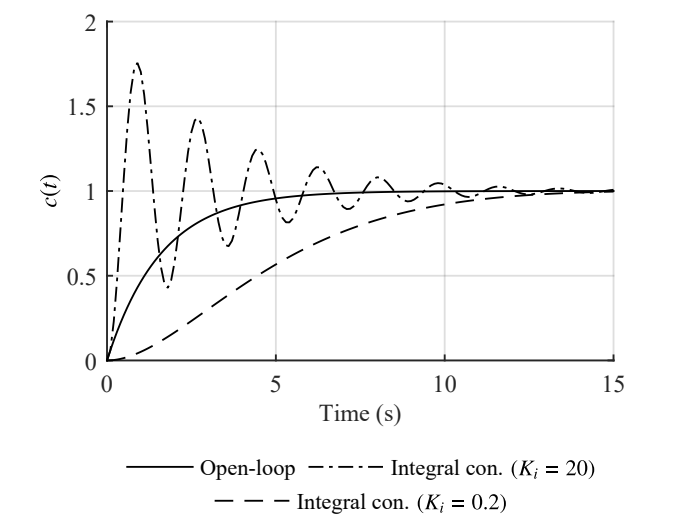
 Varying of changes the speed of the system, and varying the gain of the system changes the magnitude of the output with respect to the input
Varying of changes the speed of the system, and varying the gain of the system changes the magnitude of the output with respect to the input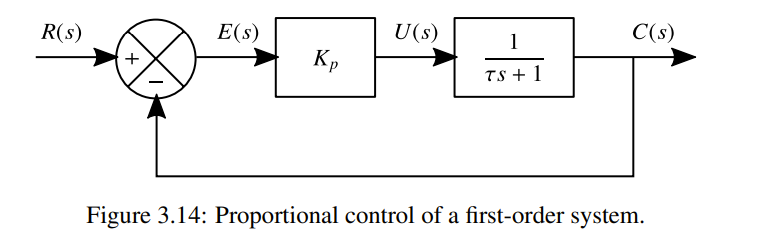
 We have here our controller (), and our plant ()
We have here our controller (), and our plant ()