General Form
Where:
damping ratio, natural frequency state || output, input gain
In addition to this we can define the:
Damped Natural Frequency
From which we can also define the:
Period of Oscillation
Response:
When our term is less than 1 we can call the system underdamped and when the term is larger than 1 it is overdamped. Finally when a system has exactly then we can call it critically damped.
Abstract
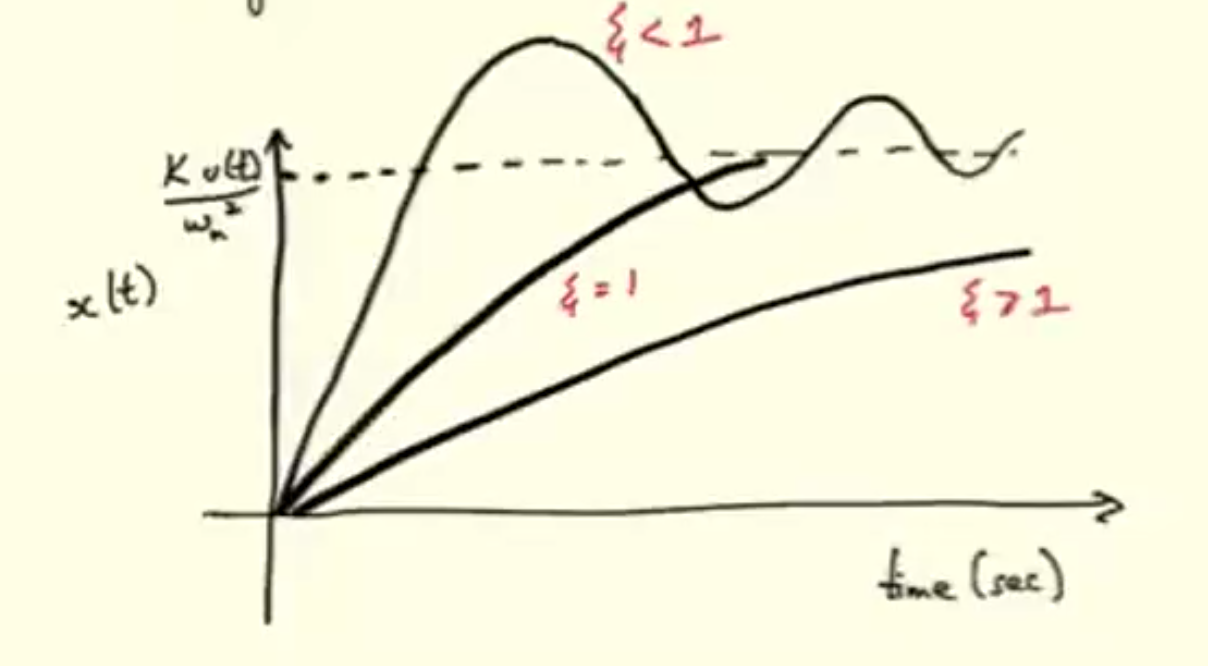
We can visually distinguish the different systems as such:
Underdamped: Oscillations present, fastest approach to SS value, but overshoots and compensates
Critically Damped: The value at which we approach the SS value fastest without overshooting and therefore oscillating
Overdamped: All other states of the system where oscillations are not present however the SS value is not achieved in optimal time
Laplace:
Proportional Control
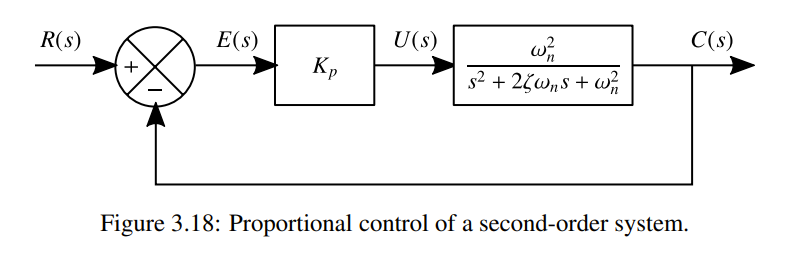
As we can see our controller () and our plant () create a proportional control system.
Reducing this block diagram we get:
Under similar logic:
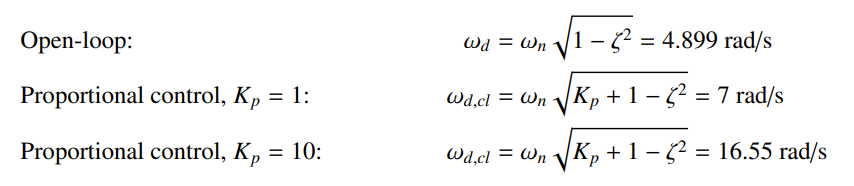
From this, expanding out full laplace equations we finally get the natural damped frequency for the closed loop system
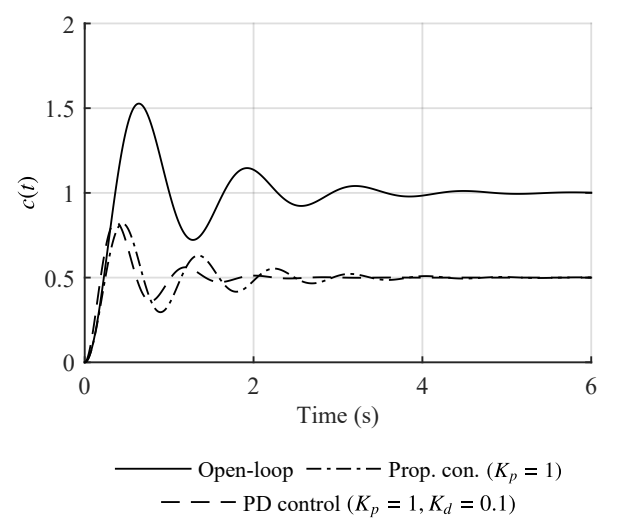
This means that simply increasing the proportional controller like we did in the first order system would cause the oscillations of the system to increase significantly. has NO effect on the damping
In these systems, increasing decreases the SS error, while increasing the frequency of oscillations:
PD Control
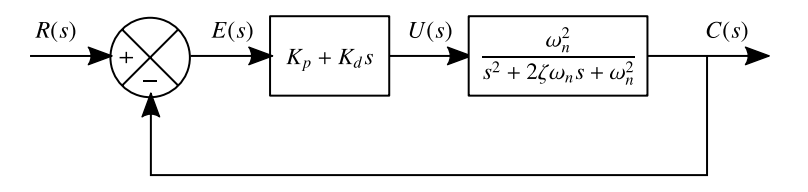 As we can see our controller () and our plant () create a proportional control system.
As we can see our controller () and our plant () create a proportional control system.
The maths for and simplify much in the same way, so this will be skipped, however:
The proportional control increases our frequency, but the derivate action modifies the damping of the system
So therefore in addition to scaling our final output by , there is an increase in oscillations over the open loop response:
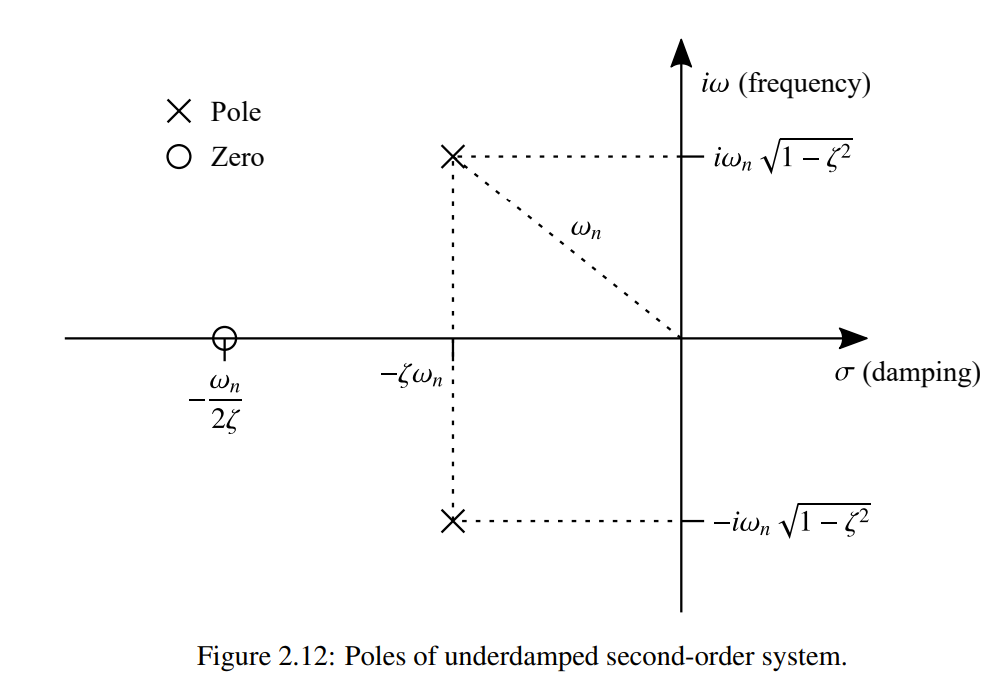
Underdamped Systems:
Roots and Zeros